Occupancy Grid Map Prediction for Mobile Robots
Fast, collision-free movement in an unseen environment remains a challenge for mobile robot systems. The robot’s ability to reason about its future motion is often limited by the sensor’s Field of View (FOV). In contrast, biological systems usually predict the future unobserved based on previous experience by considering what might exist outside of the current observation.
The Occupancy Grid Map (OGM) generated by the simultaneous localization and mapping (SLAM) algorithm using the laser scan sensor is widely used in both mobile robots and unmanned vehicles. An OGM divides the space around the robot into cells representing the state of the environment, i.e., free, occupied, or unknown. Various methods have been proposed for the prediction of OGMs, which are encoded as images. Some work focuses on the estimation and prediction of the trajectory of moving objects in OGM, while others concentrate on the structure of the environment. In one study, the author uses several deep learning-based methods, such as UNet and Generative adversarial network (GAN), to predict the expanded OGM. In another study, Variational Autoencoders (VAE) are applied to predict the structure of some unmapped regions.
In this project, we focus on a data-driven approach that does not rely on explicit assumptions about the environment but instead learns regularities from examples. Specifically, inspired by previous work, we employ UNet, VAE, and GAN to predict unknown map regions beyond frontiers. Although this project uses a network structure similar to previous studies, we have adopted a different encoding method for OGMs into traversable and untraversable cells.
The work concerned in this project is listed as follows:
We collected datasets for the deep learning-based OGM prediction task and preprocessed the data for network training.
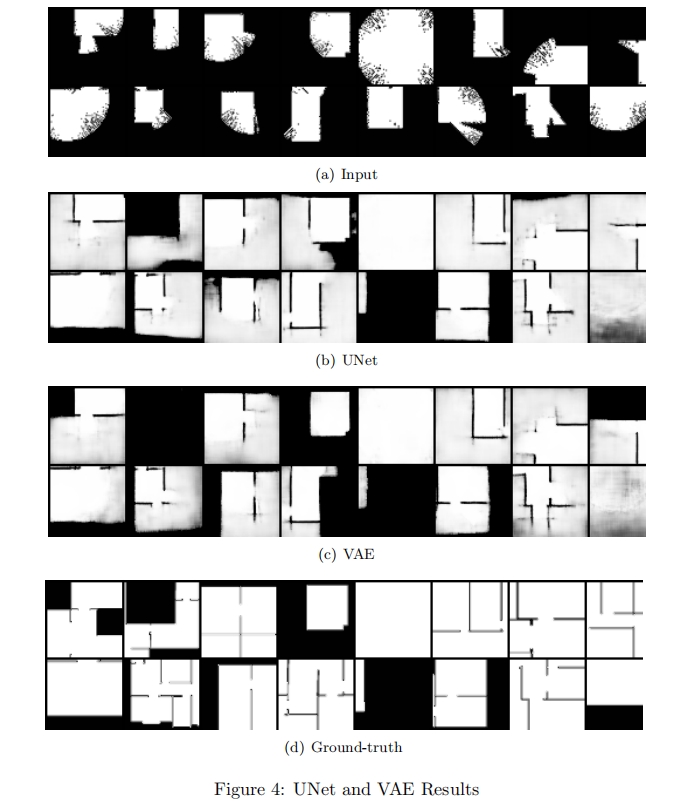
We implemented several different OGM prediction networks, including UNet, VAE, and GAN.
We trained and tested the above three networks and compared their performance on the OGM prediction task.